ГЛАВА 1. ПРОБЛЕМА УПРАВЛЕНИЯ АКТИВНЫМИ ОБЪЕКТАМИ И КОНЦЕПЦИЯ ЕЕ РЕШЕНИЯ
1.1. ПРОБЛЕМА УПРАВЛЕНИЯ АКТИВНЫМИ ОБЪЕКТАМИ
1.1.1. Классификация систем и понятие активного объекта. Определения основных терминов
С целью постановки проблемы данной работы рассмотрим классификацию систем, определим понятие активного объекта (системы), дадим авторскую интерпретацию основных терминов, используемых в работе.
Основные понятия теории систем
Рассмотрим понятие "система", обращая основное внимание на особенности применения этого фундаментального понятия в теории и практике синтеза рефлексивных автоматизированных систем управления (РАСУ) активными объектами (системами).
Прежде всего система – это целостная совокупность некоторых элементов, не сводящаяся к простой сумме своих частей, т.е. представляющая собой нечто большее, чем просто сумму частей. Это нечто, отсутствующее в частях системы, взятых самих по себе, и совершенно необходимое, чтобы элементы образовали систему, представляет собой интегрирующее начало, системообразующий фактор. Интегрирующее начало может быть как объективным, так и субъективным, а системы, соответственно, естественными и искусственными. Искусственная система есть средство достижения цели. Но и естественные, например, экологические системы, человек часто рассматривает с прагматической точки зрения, т.е. с точки зрения того, что они могут ему дать или какими они должны быть, чтобы обеспечить человеку определенные желательные условия, т.е. опять же с точки зрения соответствия определенным субъективным целям.
Различные модели систем отличаются тем, насколько полно в этих моделях отражены знания разработчиков модели о внутреннем строении моделируемых систем, и насколько эти модели являются подходящими для применения с точки зрения достижения целей АСУ.
Простейшей (полностью феноменологической)
моделью системы является модель "черного ящика" [234]. Так называют
систему, о которой внешнему наблюдателю доступны только лишь входные и выходные
параметры, а внутренняя структура системы и процессы в ней неизвестны. Входные
параметры можно рассматривать как управляющие воздействия, а желательные
значения выходных – как цель управления. Ряд важных выводов о поведении системы
можно сделать, наблюдая только ее реакцию на воздействия, т.е. наблюдая
зависимости между изменениями входных и выходных параметров. Такой подход
открывает возможности изучения систем, устройство которых либо совершенно
неизвестно, либо слишком сложно для того, чтобы можно было по свойствам
составных частей и связям между ними сделать выводы о поведении системы в
целом. Поэтому понятие "черный ящик" широко применяется при решении
задач идентификации и моделировании реакции на управляющее воздействие в АСУ
сложными объектами управления.
Важно понимать, что "черный ящик" представляет собой именно систему, причем в общем случае, сложную систему. Из этого следует очень важный вывод: оптимизировать какой–либо отдельно взятый выходной параметр нельзя, так как это может привести к уничтожению всей системы, т.е. выходные параметры необходимо рассматривать системно, т.е. в единстве, комплексе.
Несмотря на свою кажущуюся простоту, построение модели "черного
ящика" не является тривиальной задачей. Дело в том, что любая реальная
система взаимодействует со средой бесчисленным множеством способов. Строя
модель системы, из этого бесчисленного множества связей отбирают конечное их
число и включают их в список входов и выходов. Критерием отбора при этом
является целевое назначение модели, существенность той или иной связи для
достижения цели. То, что существенно и важно, включается в модель, а то, что не
существенно и не важно – не включается.
Но проблема как раз и заключается в том, что в действительности заранее никому не может быть точно известно, какие входные параметры оказывают существенное влияние на выходные целевые параметры, а какие нет. Это можно узнать, статистически исследовав эволюцию некоторого объекта в течение длительного времени, что проблематично, либо изучив достаточное количество аналогичных объектов, находящихся на различных стадиях своей эволюции, т.е. вариабельных конкретных "мгновенных" реализаций аналогичных объектов управления.
Но даже если такая информация имеется, то математически ее обработать, например с применением факторного анализа, также далеко не просто, так как обычно размерность реальных задач намного (на несколько порядков) превосходит возможности стандартных статистических методов и пакетов.
Более развитой, чем "черный ящик" является модель состава системы, в которой перечисляются составляющие ее элементы и подсистемы. Совокупность необходимых и достаточных для достижения целей управления элементов и подсистем с определенными отношениями между ними называется структурой системы.
Суммируя модели "черного ящика", состава и структуры, можно дать следующее синтетическое определение системы: "Система есть совокупность взаимосвязанных элементов, обособленная от среды и взаимодействующая с ней как единое целое для достижения определенной объективной или субъективной цели" [234].
Существуют различные подходы к классификации систем:
– по происхождению: искусственные, смешанные и естественные;
– по степени изученности структуры (наличию информации): "черный ящик", "серый ящик (непараметризованный и параметризованный классы), "белый ящик";
– по способу управления: управляемые извне, самоуправляемые, с комбинированным управлением;
– по ресурсной обеспеченности управления: энергетические ресурсы (обычные и энергокритичные), материальные ресурсы (малые и большие), информационные ресурсы (простые и сложные).
При
недостатке априорной информации об объекте управления построение его
содержательной модели затруднительно. В этих условиях, возможно применить
модель "черного ящика", которая предполагает минимум знаний о
структуре и связях входных и выходных параметров моделируемого объекта.
При построении этой модели выходные параметры определяются исходя из целей управления, а проблема выбора входных параметров, значимо влияющих на выходные, в принципе может решаться различными методами, например, такими как: многофакторный анализ, дискриминантный анализ, методы проверки статистических гипотез, методы теории информации.
В данной работе предлагаются различные варианты классификации параметров, в зависимости от того, какие состояния объекта управления и среды они характеризуют и в какой степени они зависят от человека.
Более пристального внимания заслуживает также классификация систем по ресурсной обеспеченности управления. Для того, чтобы модель реально заработала, или, как говорят была актуализирована, необходимы затраты различных ресурсов, прежде всего энергетических, материальных, информационных, финансовых, а также других.
Конечно, ресурсная обеспеченность меняется с течением времени, что связано прежде всего с совершенствованием компьютерной техники и информационных систем, а также зависит от возможностей организаций и конкретных исследователей и разработчиков. Поэтому классификация этого типа, безусловно, является относительной.
Большой называется система, поведение которой определяется всей совокупностью ее элементов, взаимодействующих между собой, ни один из которых не является определяющим [234]. В рассматриваемом контексте термин "большая" означает не пространственные размеры системы, а большое количество ее элементов. При моделировании больших систем возникает проблема высокой размерности описания. Например, если применяется многофакторная модель, то вычислительные и понятийные (связанные с интерпретацией) трудности возникают уже при количестве факторов от семи до десяти. В то же время многие реальные задачи требуют учета многих сотен и даже тысяч различных факторов. На практике чаще всего исследователь самостоятельно решает неформализованным путем, какие факторы исследовать, а какие нет.
Сложной называется система, адекватное моделирование которой требует учета отсутствующей или недоступной на момент моделирования информации [234]. Если управление приводит к неожиданным, непредвиденным или нежелательным результатам, т.е. отличающимся от ожидаемых (прогнозируемых) в соответствии с моделью, то это объясняется недостатком существенной информации, что порождает неадекватность модели.
Таким образом, простота или сложность системы относительна и указывает на достаточность или недостаточность информации о системе в действующей модели этой системы, т.е. связана с возможностью построения адекватной модели.
Определения базовых понятий, используемых в работе
Предметная область (ПО) представляет собой систему, включающую: активный объект управления, управляющую систему и окружающую среду (рисунок 1.1).
Активными будем называть системы, имеющие собственную систему целеполагания и принятия решений, а также адаптивную модель самого себя (рефлексивность) и окружающей среды, включая модели систем управления различного уровня и назначения, которые воздействуют на активную систему (АС) как на активный объект управления (АОУ). В работе термины "активная система" и "активный объект" рассматриваются как синонимы.
|
|
|
Рисунок 1.1. Структура предметной области и рефлексивной АСУ активными объектами |
Сложная система – это система, которая не может быть отображена в формальной модели по причине дефицита информации о ней.
Рефлексивная система – это система, имеющая собственную адаптивную модель себя и окружающей среды.
Из сопоставления этих определений следует, что активные системы являются одновременно сложными рефлексивными системами.
Активный объект управления (АОУ) – активная система, являющаяся объектом управления.
Классификация факторов:
– активный объект управления описывается факторами, характеризующими его текущее и прошлые состояния;
– управляющая система характеризуется технологическими факторами, с помощью которых она оказывает управляющее воздействие на активный объект управления;
– окружающая среда характеризуется прошлыми, текущими и прогнозируемыми факторами, которые также оказывают воздействие на активный объект управления.
Управляющие факторы – это факторы, оказывающие влияние на объект управления, которыми может воздействовать управляющая система. Факторы окружающей среды – это факторы, оказывающие влияние на объект управления, и действие которых не зависит от управляющей системы. Необходимо отметить, что факторы всех этих категорий в математической модели рассматриваются единообразно, что не исключает возможности изучения влияния на результаты управления отдельных различных групп или единичных факторов.
Модель активного объекта управления учитывает два уровня: информационный и поддержки. На информационном уровне локализуются функции целеполагания, синтеза и адаптации модели окружающей среды АОУ (включая управляющую систему), принятия и реализации решений. Уровень поддержки представляет собой систему, обеспечивающую функционирование информационного уровня (рисунок 1.1)
Классификация состояний АОУ. Активный объект управления характеризуется будущими состояниями, которые классифицируются как целевые и нежелательные. Причем эта классификация в общем случае различная у самого активного объекту управления и управляющей системы (они могут полностью не совпадать, а также частично или полностью совпадать).
Адаптация модели ПО – количественное изменение параметров модели, уточнение обобщенных образов классов и семантических портретов факторов.
Синтез модели ПО – формирование или качественное изменение параметров модели: формирование образов новых классов и/или учет влияния новых факторов. Формальная модель ПО представляет собой математическую модель, численный метод, структуры баз данных, алгоритмы их обработки, обеспечивающие отображение в количественной форме структуры ПО, а также изучение причинно-следственных взаимосвязей между факторами и будущими состояниями АОУ.
Системно-когнитивный анализ (СК-анализ) – это системный анализ, как метод познания, структурированный до уровня базовых когнитивных операций.
Автоматизированный системно-когнитивный анализ (АСК-анализ) (Automated system cognitive analysis) – это системно-когнитивный анализ в котором базовые когнитивные операции автоматизированы.
1.1.2. Двухуровневая модель активной системы и рефлексивное мета-управление
По-видимому, понятие активной системы впервые предложено отечественными учеными В.В. Дружининым и Д.С. Конторовым в 1976] [71]. В дальнейшем большой вклад в развитие теории активных систем внесли Бурков В.Н., Новиков Д.А., Черкашин А.М. [32].
Определение активной
системы: активные системы – это
системы с целеполаганием и активной свободной волей, поведение которых основано
на накоплении информации о себе и окружающей среде, ее анализе, прогнозе
собственного состояния и состояния окружающей среды, на принятии и реализации
решений.
Примерами активных систем
являются люди, коллективы (предприятия), социально-экономические системы
различных уровней и масштабов: от коллективов и предприятий, до территориально-распределенных
межотраслевых комплексов, а также биологические и экологические системы,
некоторые интеллектуальные кибернетические системы и многие другие.
Соотношение содержания
понятий "сложная система" и "активная система": из определения активной
системы следует, что функции, характерные для активных систем, могут реализоваться
только за счет сложной системы их
поддержки.
Отсюда следует еще одно
определение активных систем: активные системы – это сложные системы с
целесообразным поведением.
Это определение является
"классическим" в том смысле, что дано через подведение под более
общее понятие ("сложная система") и выделение специфического признака
("целесообразное поведение").
Это означает, что активную
систему можно упрощенно представить в виде двухуровневой модели: т.е.
суперпозиции, объединения двух систем (рисунок 1.2):
1. Интеллектуальной информационной системы (ИИС), обеспечивающей
целеполагание, накопление информации (мониторинг), ее интеллектуальный анализ,
прогноз развития себя и окружающей среды, принятие решений.
2. Сложной системы поддержки функций (ССПФ) ИИС и реализации
управляющих воздействий.
|
|
Понятие рефлексии: из определения активной
системы непосредственно следует, что они действуют на основе определенной
сформированной и постоянно модифицируемой ими модели самих себя и окружающей
среды, причем в модель окружающей среды входит и модель внешней автоматизированной
системы управления (АСУ), которая оказывает воздействие на активную систему.
Итак, в связи с тем, что активные системы рефлектируют, управление ими
может быть только рефлексивным. Нерефлексивные
адаптивные модели в случае управления активным объектом управления просто не
обеспечивают необходимого уровня адекватности, так же как линейные модели
непригодны для управления существенно нелинейными процессами.
Поэтому предлагается новое понятие: "рефлексивная АСУ"
(РАСУ), – это АСУ, в которой в качестве объекта управления выступает активная
система, т.е. это АСУ активным объектом управления (АОУ): РАСУ АОУ.
Новизна теории РАСУ АОУ по
сравнению с классической теорией автоматизированных систем управления состоит
прежде всего в том, что в классической теории активной стороной является только
система автоматического управления (САУ), а объект управления (ОУ)
рассматривается только как пассивный
объект управляющих воздействий, в РАСУ же объект управления также является
активной стороной (субъектом), он стремится к своим целям, которые в общем
случае не совпадают с целями управления, активно отражает окружающую среду,
включая АСУ, адаптируется, вырабатывает и реализует решения.
Поэтому, несмотря на то, что рефлексивное управление уже получило
определенное развитие в рамках таких наук, как психология, менеджмент,
имиджмент, акмеология, для теории автоматизированного управления рефлексивное
управление является новым перспективным направлением научных исследований и
разработок. Именно в рамках теории автоматизированного управления рефлексивное
управление может стать автоматизированным, т.е. получить в свое распоряжение
математические и алгоритмические модели и реализующие их программные системы, а
также соответствующую методологию, технологию и методику их применения.
Поэтому можно обоснованно утверждать, что в автоматизации состоит одно из перспективных направлений развития
рефлексивного управления.
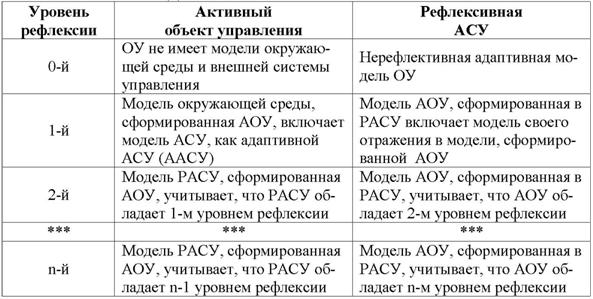
Понятие уровня рефлексии, соотношение между адаптивными и рефлексивными АСУ. Чтобы раскрыть данный вопрос рассмотрим таблицу 1.1:
Между адаптивными АСУ сложными системами (ААСУ СС) и рефлексивными АСУ
активными объектами (РАСУ АО) есть много общего, можно даже сказать, что РАСУ
АО в определенном смысле являются развитием ААСУ АС, поэтому представляет
интерес их сопоставление.
В этой связи необходимо отметить, что адаптивные АСУ сложными системами
по существу являются РАСУ 0-го порядка рефлексивности.
|
Таблица 1. 1 – СОДЕРЖАНИЕ ПОНЯТИЯ: "УРОВЕНЬ РЕФЛЕКСИИ" |
|
|
Поэтому развитие теории РАСУ активными объектами можно рассматривать
как одну из "точек роста" теории адаптивных систем управления сложными
объектами.
Итак, адаптивные системы управления являются частным случаем
рефлексивных. Общее между ними в постоянной модификации модели объекта
управления и окружающей среды в системе управления.
Существует две основные причины, определяющие необходимость адаптации
системы управления:
1. Динамика предметной области, т.е. объекта управления и окружающей
среды.
2. Повышение степени адекватности модели предметной области до необходимого
уровня.
Необходимо отметить, что время адаптации модели до приемлемого уровня
адекватности определяется возможностями (вычислительными и информационными
ресурсами) АСУ и может превышать время нахождения предметной области в относительно
стационарном состоянии. В этом случае происходит срыв управления. Так неопытный
художник не может написать "похожий на оригинал" портрет, если натура
все время "вертится". Основной причиной этого является то, что информация
стареет и становится неадекватной. При использовании для выработки
управляющих воздействий закономерностей и взаимосвязей между управляющими
факторами и результатами их воздействия, выявленных на основе устаревшей,
неадекватной информации, соответственно будет получен и неадекватный результат.
Поэтому непрерывное накопление все больших объемов статистики само по себе еще
не обеспечивает все большего соответствующего увеличения точности.
Если предметная область стационарна, то новые объемы информации
обладают все меньшей и меньшей новизной и вносят все меньший вклад в увеличение
точности модели. Иначе говоря уменьшение погрешности модели на одну и ту же величину
(например 1%) сначала обходится дешево, а затем все дороже и дороже. Поэтому
начиная с момента накопления определенного объема информации в базе данных и
достижении требуемой точности модели продолжение процесса накопления информации
становится нерациональным и этот процесс останавливают. Таким образом в этом
случае можно изучить предметную область один раз перед проектированием АСУ и
больше к этому вопросу не возвращаться. Если же предметная область вдруг
неожиданно и существенно измениться, то в такой АСУ произойдет срыв управления,
т.к. она станет неадекватной.
Если же предметная область динамична, то устаревшая информация может
искажать картину и фактически является шумом, а новой информации может быть
недостаточно для достижения необходимой точности модели. Соответственно возникает
задача определения оптимальной продолжительности учитываемой предыстории на
основе исследования соотношения "стоимость информации/точность
модели". Поэтому, в этом случае, необходимо непрерывно (или периодически в
соответствии с определенным регламентом) накапливать информацию и изучать,
познавать предметную область, чтобы обеспечить актуальность исходной информации
и адекватность модели для принятия решений.
Функция интеллектуального анализа и познания предметной области обычно
выполняется (реализуется) разработчиками АСУ непосредственно перед ее
проектированием (НИР и ОКР) с применением уже имеющихся в арсенале науки
знаний, выработанных поколениями ученых.
Когда исследование предметной области необходимо провести один раз в
течение достаточно длительного специально отведенного для этого времени, то это
в общем-то представляет собой вполне посильную и в какой-то степени техническую
задачу.
Когда же это необходимо делать непрерывно, в реальном времени (т.е.
непосредственно в процессе эксплуатации АСУ), при жестких временных
ограничениях и больших размерностях обрабатываемых данных, то человек не
справляется с выполнением функции познания предметной области и становится узким
местом в системе управления, и, таким образом, возникает проблема, которую необходимо разрабатывать и решать.
Обычно задачи управления такого класса, которые требуют для своего
решения накопления информации, ее интеллектуального анализа и познания
динамичной предметной области в реальном времени при жестких ограничениях и
больших размерностях данных, просто не решались.
Предлагается автоматизировать часть функций познания, т.е. некоторые из
когнитивных операций, обычно реализуемых человеком, т.е. дать
человеку-исследователю, человеку-аналитику инструмент, средство труда, более
эффективно чем он, выполняющий переданные ему функции, освобождающий человека
от нагрузки, связанной с выполнением переданных функций и, этим самым, и
повышающий эффективность выполнения им оставшихся функций.
Средство автоматизации когнитивных операций представляет собой средство
труда высокого функционального уровня и как всякое средство труда, реализует
переданные ему функции, ранее выполнявшиеся только человеком, вне биологических
и психических ограничений человека, человек же выполняет оставшиеся ему функции
в более комфортном режиме, не будучи обремененным выполнением функций,
переданных средству труда.
Однако различие между адаптивными и рефлексивными АСУ, связанное
с учетом или неучетом существования рефлексии не является единственным. Второе,
и может быть даже более существенное, различие состоит в характере управляющего
воздействия, которое особенно наглядно проявляется в случае управления
двухуровневым АОУ:
1. Управляющее воздействие в ААСУ АОУ направлено на ССПФ ИИС. При этом
есть два варианта, связанные с тем, выключается или нет ИИС в результате
управляющего воздействия на сложную систему поддержки (рисунок 1.3):
– ССПФ ИИС не выключается и ее действие приводит к тому, что АОУ
"сопротивляется" внешнему управляющему воздействию, что приводит к
неоправданным затратам энергии на управление (инерция), а также к тому, что
система вообще не переходит в целевое состояние или через некоторое время возвращается
в исходное состояние;
– ССПФ ИИС выключается, и тогда управление АОУ ничем не отличается от
классического варианта адаптивного управления АОУ.
2. Управляющее воздействие РАСУ АОУ направлено непосредственно на ИИС.
Это приводит к коррекции целей и мотиваций АОУ в направлении их сближения и
согласования с целями внешней системы управления, что приводит к изменению
направления его активности в русло, обеспечивающее "самопроизвольный"
переход АОУ в заданное целевое состояние. Очень существенно, что при этом
затраты энергии на управление могут быть практически нулевыми по сравнению с
вариантом воздействия на ССПФ.
|
|
|
Рисунок 1. 3.
Различие в характере управляющего воздействия на АОУ
|
Наглядным примером, отражающим характер (уровень) воздействия на
активный объект управления – пациента, является лечебное управляющее воздействие
врача:
– врач-хирург физически воздействует на организм пациента (т.е. на
сложную систему поддержки психических функций), как сложную систему;
– врач-психотерапевт психически воздействует на психику пациента,
модифицируя его мотивации, ценности, способы оценки, стимулы и установки,
рассматривая его как активную систему.
Для обеспечения высокой эффективности воздействия психотерапевт должен
предварительно создать у пациента свой образ, внушающий высокий авторитет и
доверие. Если пациенту будет по каким-то причинам смешно смотреть или слушать
психотерапевта, то последний обречен на неудачу. Таким образом, психотерапевт управляет пациентом, как
активной системой методом рефлексивного управления.
Когда при управлении человеком не считаются с тем, что он представляет
собой активную систему, т.е. без согласования с ним оказывают прямое
воздействие на его организм, то это часто
рассматривают как насилие, оскорбление или преступление.
Примеры рефлективного взаимодействия высокого порядка:
1. Слова из песни популярной группы: "Она обернулась чтобы
посмотреть, не обернулся ли он, чтобы посмотреть, не обернулась ли она".
2. "Коридор", который получается при отражении зеркал друг в
друге или изображение на видеомониторе, которое получается, когда на него
направляешь видеокамеру, соединенную с ним.
3. Микрофон, поднесенный к динамикам, соединенный с ними.
Третий пример наглядно иллюстрирует, что РАСУ высокого порядка
рефлективности в принципе могут и самовозбуждаться, если величина рефлексии
больше некоторой величины.
Возникает естественный вопрос о необходимости и целесообразности учета
высоких порядков рефлективности в АСУ.
В этой связи необходимо отметить, что:
– системы высокого порядка рефлективности встречаются редко и являются
довольно экзотическими;
– как правило, эффект от рефлексивных взаимодействий 2-го и более
высоких порядков быстро ослабевает и на практике им можно пренебречь;
– при необходимости учета высоких порядков рефлективности резко
возрастает сложность математических моделей и алгоритмов для их анализа, а
также трудоемкость сбора и анализа информации.
Все это делает рассмотрение РАСУ высоких порядков рефлективности
неоправданным, поэтому в данном исследовании ограничимся рассмотрением РАСУ
1-го порядка рефлективности, которые в дальнейшем изложении будут называться
просто "РАСУ" без дополнительных специальных уточнений.
Связь рефлексивного управления и системного анализа: одно из основных требований
системного анализа – это требование полноты и всесторонности рассмотрения. Это
требование не может быть в полной мере выполнено без учета рефлексии, т.к. нерефлексивные модели активных объектов
просто неполны, а значит неадекватны. При управлении детерминистскими
системами рефлексивностью часто можно пренебречь без существенного ущерба для
качества управления, когда же объект управления представляет собой активную
систему, неучет рефлективности приводит к недопустимому уровню неадекватности
модели.
Это означает, что необходимо непрерывно изучать, познавать АОУ для
обеспечения адекватности его модели.
Не вполне адекватным является представление о том, что рефлексия
характерна только для достаточно развитых систем, например биологических или
даже только обладающих сознанием и самосознанием. Рефлексия представляет
универсальное свойство объектов не только живой, но и неживой природы на всех
иерархических уровнях организации систем: и в микромире, и на макро- и мега-
уровнях, т.е. рефлексия является одним из проявлений всеобщего взаимодействия и
взаимного отражения в природе. В качестве примеров достаточно привести второй
закон Ньютона и вариационные принципы, в частности, принцип Мопертюи.
Это означает, что методы рефлексивного управления применимы и актуальны
не только для управления социально-экономическими, экологическими,
биологическими и интеллектуальными кибернетическими системами, но и для
управления макро- и микрообъектами неживой природы, причем не только
классическими, но и особенно квантовыми. Последнее заслуживает пояснения.
Квантовые объекты являются системами, которые могут находится в двух
основных состояниях: редуцированном, т.е. локализованном в пространстве-времени,
и в виртуальном, при котором пространственное распределение плотности
вероятности описывается нелокальной волновой функцией. Именно при измерении
параметров квантовых объектов или оказании на них классического по своей
природе управляющего воздействия с помощью классических приборов происходит их
полная или частичная редукция, т.е. их состояние существенно изменяется. Это
можно рассматривать как проявление рефлексии.
Необходимо отметить, что на первый взгляд понятие цели имеет чисто
субъективный характер и, соответственно, активные системы – это системы, в
которых есть какой-то элемент сознания. Однако это не совсем так. В ряде
случаев поведение физических и природных систем, которым трудно приписать
сознание, проще понять и смоделировать, если предположить, что они как бы
стремятся к некоторым объективным целям (достаточно вспомнить "Принцип
Мопертюи").
Поведение активных систем прогнозировать сложнее, чем детерминистских,
т.к. активность вносит существенный элемент неопределенности. Это сближает
активные системы с стохастическими. Отличие состоит в том, что в стохастических
системах неопределенность имеет случайный характер, т.е. представляет собой ни
что иное, как шум, статистические характеристики которого обычно известны. Это
обстоятельство позволяет прогнозировать и учитывать характеристики этого шума
при управлении.
Неопределенность в поведении активных систем имеет принципиально иной,
гораздо более сложный, целесообразный характер. Активная система может
по-разному реагировать на одно и то же управляющее воздействие в зависимости от
предыстории своего развития, состояния окружающей среды и прогноза их развития.
Более того, активная система адаптируется к применяемым методам управления ею,
включая в свою модель окружающей среды и саму внешнюю систему управления. Модель
активной системы, на основе которой осуществляется управление ею, должна
учитывать это обстоятельство, поэтому она с необходимостью должна быть не
просто адаптивной, а более того – рефлексивной (Дружинин В.В., Конторов Д.С.,
1976 [71].
Из того, что активная
система создает и непрерывно модифицирует модель внешней среды (включая модель
внешней системы управления), непрерывно обеспечивая ее адекватность, с
необходимостью следует, что управление активной системой предполагает
непрерывное ее изучение (познание), на основе которого должна адаптироваться
модель активной системы в системе управления.
1.1.3. Постановка проблемы, выбор объекта и предмета исследования
Развитие активных систем представляет собой последовательное чередование этапов принятия и реализации решений. На этапе принятия решения (состояние бифуркации) состояние АС фиксировано, а направление его будущего развития неопределенно. В этом состоянии формируются или задаются закономерности, определяющие дальнейшее развитие системы на детерминистском этапе, при этом система изменяется (трансформируется) качественно, т.е. революционно. Именно в состоянии бифуркации проявляются те специфические особенности активных систем, которые позволяют называть их активными. На этапе же реализации решения (детерминистский этап), наоборот, направление развития фиксировано, а состояние АС неопределенно. В этом состоянии система развивается в соответствии с закономерностями, заданными ранее на бифуркационном этапе, при этом система изменяется количественно, т.е. эволюционно. На детерминистских этапах АС по сути можно рассматривать как сложные системы.
Необходимо отметить, что примерно с середины 80–х годов школа И.Пригожина развивает чрезвычайно перспективный и глубокий подход, согласно которому в развитии любой системы (в том числе и человека) чередуются периоды, в течение которых система ведет себя то как "в основном детерминированная", то как "в основном случайная", т.е. системы развиваются путем поочередного прохождения детерминистских и бифуркационных состояний. Однако в данном данном исследовании понятие бифуркации понимается несколько шире: т.е. как принятие решений, соответственно, детерминистский этап рассматривается как этап реализации решений. Случайный выбор направления дальнейшего развития системы представляет собой лишь один из возможных подходов к принятию решений, приемлемый в случае дефицита информации.
При управлении активными объектами на детерминистских этапах их развития адекватны адаптивные АСУ сложными системами, основанные на: мониторинге; выявлении закономерностей в предметной области путем анализа данных мониторинга; применении выявленных закономерностей в предметной области для прогнозирования развития АС и управления ей; количественном уточнении модели предметной области на основе использования информации обратной о результатах управления.
Таким образом на детерминистских этапах развития АС осуществляется адаптация формальной модели ПО, в которой в формализованном виде накапливаются знания о закономерностях, действующих на этом этапе.
Однако, на бифуркационном этапе развития АС формализованное знание закономерностей ПО, накопленное на предыдущем детерминистском этапе развития АОУ, теряет свою адекватность и является практически бесполезным или даже вредным для дальнейшего управления АОУ. При применении устаревшей модели для управления недопустимо повышается вероятность срыва управления, т.е. перевода АОУ в нецелевые состояния, что крайне нежелательно или недопустимо.
Итак, в данной работе ставится и решается проблема обеспечения
устойчивого управления активными объектами как на детерминистских, так и на
бифуркационных этапах их развития.
Предлагается решение этой проблемы путем разработки универсального
математического метода и соответствующего инструментария автоматизации системного анализа, как метода познания, т.е. путем
декомпозиции системного анализа до уровня базовых когнитивных операций,
разработки теоретических основ, инструментария и технологии АСК-анализа.
Выдвигается гипотеза, что это позволит обеспечить устойчивое
управление активными объектами как на детерминистских, так и на бифуркационных
этапах их развития.
Объект исследования: системный анализ активных объектов.
Предмет исследования: управление активными объектами на основе автоматизированного
системно-когнитивного анализа (АСК-анализа).
1.2. ТРЕБОВАНИЯ К МЕТОДАМ РЕШЕНИЯ ПРОБЛЕМЫ И КРИТЕРИИ ИХ СРАВНЕНИЯ
Эти требования по сути
являются требованиями к математической модели активного объекта управления, а
критерии – критериями оценки степени адекватности модели.
Требования можно разделить
на две основные группы:
– общие требования,
связанные с качеством выполнения моделью своих функций и ее реализуемостью;
– специфические требования,
вытекающие из их использования для синтеза и эксплуатации адаптивных АСУ
сложными объектами.
Рассмотрим эти требования по
порядку. Необходимо отметить, что в соответствии с концептуальной идеей решения
основной проблемы, поставленной в данной работе (см. раздел 1.5), рассмотрим
методы распознавания образов и принятия решений с точки зрения их применимости
для моделирования активных объектов управления в рефлексивных АСУ активными
объектами.
1.2.1. Общие требования (критерии качества)
Одно из основных общих требований к модели – "функциональность". Под функциональностью понимается пригодность модели для достижения поставленной цели. В контексте данной работы модель функциональна, если она обеспечивает адекватную идентификацию текущего состояния моделируемого объекта и отражает динамику его развития.
Очевидно, что функциональность модели не является единственным критерием ее качества. Показателями качества модели являются также либо собственно вероятность ошибки классификации, либо связанные с ней некоторые функции потерь. При этом различают условную вероятность ошибочной классификации, ожидаемую ошибку алгоритма классификации на выборке заданного объема, и асимптотическую ожидаемую ошибку классификации. Функции потерь также разделяют на функцию средних потерь, функцию ожидаемых потерь и эмпирическую функцию средних потерь.
Необходимо отметить, что само понятие "ошибка классификации" предполагает, что существует независимый от алгоритма распознавания способ, позволяющий достоверно определить, к какому классу относится каждый распознаваемый объект. Обычно (но не всегда) считается, что таким способом является экспертная оценка. На этой основе может быть сформулирован соответствующий критерий качества алгоритмов распознавания, который можно было бы назвать "степень соответствия экспертным оценкам", или более пространно: "очевидность и естественность результатов автоматизированной классификации для человека–специалиста". Дело в том, что, к сожалению, слишком часто результаты автоматизированной классификации плохо интерпретируются, т.е., проще говоря, малопонятны или совсем непонятны людям, несмотря на то, что при этом они являются правильными с точки зрения определенных формальных критериев. Это безусловно является существенным недостатком таких алгоритмов.
Кроме того, алгоритмы распознавания имеют свои "области
компетентности", т.е. эффективность их работы в большей или меньшей
степени зависит от статистических характеристик входных данных (обучающей
выборки), и от того, что априорно известно об этих статистических
характеристиках. В данном исследовании предлагается соответствующий критерий
качества распознающего алгоритма, который мог бы быть назван "универсальность".
Практически во всех случаях предъявляются более или менее жесткие требования и ко времени решения задачи. В ряде случаев быстродействие алгоритма играет очень существенную, если не решающую роль: например, в военных приложениях (конечно, при условии, что идентификация выполняется правильно). Во всяком случае с прагматической точки зрения можно считать, что если на реальных данных, которые необходимо обработать, алгоритм работает неприемлемо долго, то можно сделать вывод о том, что он просто практически не работает.
Конечно, время решения задачи (при всех прочих равных условиях) определяется не только вычислительной эффективностью алгоритма, но и мощностью вычислительной системы (компьютера). Поэтому использование современных быстродействующих компьютеров весьма желательно. И все же не следует смешивать эти две проблемы, так как при любом уровне развития вычислительной техники всегда существовали алгоритмы, которые работали практически, а также алгоритмы, которые работали лишь теоретически, т.е. гипотетически.
Следующим критерием качества модели является ее "логическая сложность". Часто алгоритмы с более высокой достоверностью распознавания являются и более сложными.
Например, такие развитые и качественные с точки зрения высокой достоверности распознавания методы, как комплексные методы: "алгоритмы вычисления оценок" (АВО) и "коллективы решающих правил" (КРП) [75] имеют очень высокую сложность. Отсюда следует высокая сложность их программной реализации, а также низкое быстродействие, сложность интерпретации результатов их работы.
Косвенным критерием качества распознающего алгоритма является "наличие коммерческой программной реализации", а также популярность у пользователей соответствующей программной системы.
Естественно, упомянутыми выше критериями качества алгоритмов распознавания их перечень не ограничивается. Учитывая это, предлагается ввести понятие "интегральный критерий качества алгоритма распознавания". В предварительном плане для количественной оценки интегрального критерия можно предложить метод сведения многокритериальной задачи к однокритериальной, однако более подробное рассмотрение этих вопросов выходит за рамки данной работы.
По–видимому, идеальным, с точки зрения предложенных выше критериев качества, можно считать универсальный, высокоадекватный, быстросходящийся и устойчивый, быстродействующий и простой алгоритм, дающий интуитивно–понятные специалистам результаты.
Например, применяются три
основных экспериментальных метода оценки наиболее распространенного критерия
качества распознающих алгоритмов, вероятности достоверного распознавания:
– выборка используется одновременно как обучающая и контрольная;
– выборка разбивается на две части – обучающую и контрольную;
– из всей выборки случайным образом извлекается один объект, а по оставшимся синтезируется решающее правило и производится распознавание извлеченного объекта, эта процедура повторяется заданное число раз (например, до полного перебора).
Первый способ дает завышенную оценку качества распознавания по сравнению с той же оценкой качества по независимым от обучения данным. Второй способ является самым простым и убедительным. Им широко пользуются, если экспериментальных данных достаточно. В то же время третий способ, называемый также методом скользящего экзамена, является наиболее предпочтительным, так как дает меньшую дисперсию оценки вероятности ошибки. Однако этот метод является и самым трудоемким, так как требует многократного построения правила распознавания.
1.2.2. Специфические требования, вытекающие из проблематики исследования
Кроме общих требований к методу распознавания образов, существуют еще и специфические, которые вытекают из применения этого метода для синтеза и эксплуатации адаптивных АСУ сложными системами.
Метод должен обеспечивать:
– решение обратной задачи распознавания: т.е. по целевому состоянию АОУ он должен определять входные параметры, переводящие объект управления в это состояние;
– сравнение целевых и иных состояний активного объекта управления по тем факторам, которые способствуют или препятствуют переводу АОУ в эти состояния (изучение вопросов устойчивости управления).
Таким образом, на основе вышеизложенного можно сформулировать следующие основные требования к моделям АОУ, ориентированные на применение в РАСУ АО.
Модель должна обеспечивать:
– идентификацию состояния АОУ по его выходным параметрам (при независимости времени идентификации от объема обучающей выборки);
– выработку эффективных управляющих воздействий на активный объект управления;
– накопление информации об объекте управления и повышение степени адекватности модели, в том числе в случае изменения характера взаимосвязей между входными и выходными параметрами АОУ (адаптивность);
– определение ценности факторов для детерминации состояний АОУ и контролируемое снижение размерности модели при заданных граничных условиях, в том числе избыточности.
Кроме того, модель должна быть математически прозрачной (достаточно простой) и технологичной в программной реализации.
1.3. ТРАДИЦИОННЫЕ ПУТИ РЕШЕНИЯ ПРОБЛЕМЫ
1.3.1. Характеристика исходных данных и требования к математической модели
Предполагается, что исходные данные обладают большими размерностями (тысячи и десятки тысяч факторов и состояний объекта управления), не подчиняются нормальному распределению, являются фрагментарными (неполными), а также неточными и зашумленными. Считается, что их невозможно собрать в результате специально-организованного эксперимента и единственным способом их получения является наблюдение.
Из этих характеристик
исходных данных вытекают следующие основные требования к математической модели:
– содержательная интерпретируемость;
– эффективная вычислимость на основе
эмпирических данных (наличие эффективного численного метода);
– универсальность;
– адекватность;
– сходимость;
– семантическая устойчивость;
– сопоставимость результатов моделирования в
пространстве и времени;
– непараметричность;
– формализация базовых когнитивных операций
системного анализа (прежде всего таких, как обобщение, абстрагирование,
сравнение классификация и др.);
– корректность работы на фрагментарных,
неточных и зашумленных данных;
– возможность обработки данных очень больших
размерностей (тысячи и десятки тысяч факторов и будущих состояний объекта управления);
– математическая и алгоритмическая ясность и
простота, эффективная программная реализуемость.
Рассмотрим различные классы
моделей на предмет их соответствия предъявляемым требованиям.
1.3.2. Понятие модели; классификация и общие принципы построения моделей. Выбор класса модели активного объекта управления в рефлексивной АСУ (содержательные информационные модели)
При построении АСУ существует фундаментальная и в принципе неустранимая проблема, вытекающая из противоречия между целью и средствами АСУ. Это проблема адекватности средств: АСУ создаются для управления состояниями реальных объектов, а манипулируют они лишь условными сигналами о состояниях реальных объектов и их математическими моделями.
Перед принятием решения о характере управляющего воздействия на объект его возможные результаты моделируются в АСУ на основе математической модели объекта управления. Поэтому эффективность АСУ непосредственно связана с адекватностью модели объекта управления и достоверностью информации о его реальных состояниях.
В этой связи для достижения целей исследования необходимо:
– рассмотреть роль и место математических моделей в общей системе классификации моделей различного типа;
– дать определение сложной системы и сложного объекта управления АСУ;
– сформулировать общие принципы построения математических моделей сложных систем;
– обосновать выбор абстрактной модели АОУ.